[分布式专题] 一次Etcd集群宕机引发的思考
前一段时间学习Kubernetes的过程中接触到Etcd, 它是一个强一致性的分布式键值存储数据库, 亦可作为服务发现的存储仓库, Kubernetes将所有集群的信息存储在Etcd中. 在应用场景和功能特性上与ZooKeeper非常类似, 但也有一些区别。笔者前不久在虚拟机中折腾了一个单节点的Kubernetes"集群", 但几次不小心一脚踹掉了电源线导致了整个"集群"断电. 第三次踹掉电源线时, 意外发生了, kubectl命令全部因为请求kube-apiserver超时失败.
定位原因
一开始发现这个问题是虚拟机启动后, 打开Kubernetes的Dashboard无法显示, SSH进去执行kubectl报错:  然后开始检查各项服务是否正常
然后开始检查各项服务是否正常
#报错: timeout
kubectl get componentstatus
kubectl cluster-info
systemctl status -l kube-apiserver.service
systemctl status -l kubelet.service
systemctl status -l etcd.service执行到查询etcd服务状态时, 发现服务启动失败了, 一直在自动重启中的状态, 用journalctl命令查询日志
journalctl -xe
journalctl -u etcd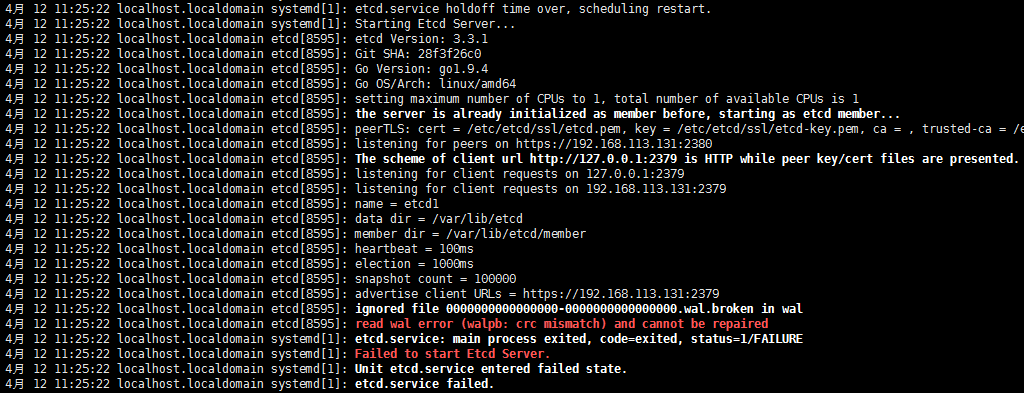 问题很明确了, 是因为断电导致Etcd的日志wal文件损坏, 而且Etcd集群节点数量只有1, 损坏数量超过了 (N - 1) / 2, 所以Etcd集群无法恢复数据, 导致启动失败.
问题很明确了, 是因为断电导致Etcd的日志wal文件损坏, 而且Etcd集群节点数量只有1, 损坏数量超过了 (N - 1) / 2, 所以Etcd集群无法恢复数据, 导致启动失败.
刨根问底: CAP定理与一致性算法
CAP定理:一个分布式系统不可能同时满足**一致性(C), 可用性(A)和分区容错性(P)**这三个基本需求, 最多只能同时满足其中的两项.
Etcd与Mongodb这样的分布式存储数据库一样, 选择了一致性(C)和分区容错性(P), 一定程度上牺牲了可用性. 笔者从这里摘录了一张主流数据库选择了CAP中的哪两个的图片: 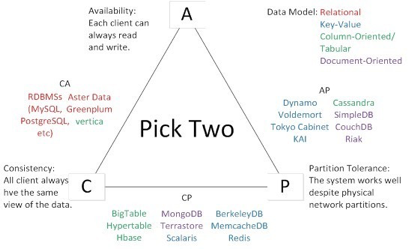
从一致性算法说起
一致性算法需要解决的问题是: 如何在一个可能发生机器宕机或网络异常等异常情况的分布式系统中, 快速且正确地在集群内部对某个数据的值达成一致, 并且保证不论发生以上任何异常, 都不会破坏整个系统的一致性.
常见的一致性算法有Paxos、Raft、PBFT等. ZooKeeper底层使用基于Paxos扩展出来的Zab协议实现一致性, 而本文的主角Etcd底层使用的是Raft协议. PBFT(拜占庭容错算法)也是一种共识算法, 主要在可能存在不可信节点的集群中保障一致性, 应用场景在区块链中, 这里不做展开.
Raft算法简述
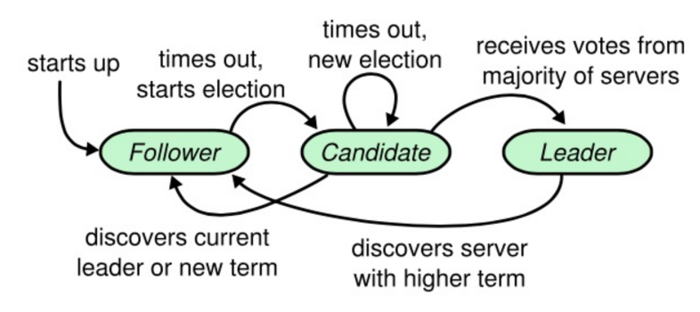
Raft算法的确比Paxos算法要容易理解的多, 算法的核心是一个状态转换机, 任何一个节点的状态为这三种状态之一:
- Leader: 处理所有客户端交互, 日志复制等, 一般一次只有一个Leader, 在出现网络分区时会选举出多个Leader, Leader发现存在别的Leader比自己的任期长就回归Follower
- Follower: 接受Leader的消息被动改变自己的状态, 如追加日志, 接受commit等
- Candidate: 当Follower在150~300ms内未接受到Leader的Heartbeat时, 会开始Leader选举, 转换为候选节点拉票, 当Candidate拉到半数以上节点的票票后就会成为Leader

在节点的状态转换过程中涉及到这几个概念: 任期(Term)、Leader选举、日志复制等, 算法的细节较多, 完整的算法详细可参考这篇斯坦福大学的论文. Raft算法中关键的几个点如下, 部分摘录自这篇Blog.
如何进行leader选举
- 每个follower节点都有成为leader的想法, 在初始化阶段或leader节点宕机时, 一轮任期的选举开始.
- follower节点在一个随机的时间片结束后会进入候选状态, 告诉其他节点投自己的票.
- 每个任期中每个follower只能投一票, 并且会投给第一个接受到的投票请求对应的候选节点.
- 当一个候选节点的票数过半时就成为leader, 新一轮任期正式开始, 同时leader向其他节点发送心跳包(包含日志复制的消息)来确认数据的一致性.
如何进行日志复制
- 客户端发送一个改变数据的请求X,
- Leader将X写入自己的日志中, 并向所有Follower发送日志追加(Append Entries)请求A(X)
- Follower接受A(X), 将X的数据变更写入日志并返回给Leader
- 当不少于(N - 1) / 2 个Follower(加上自己已经过半)响应成功时, Leader发起commit该数据并向所有节点发送commit请求C(X), 同时响应客户端
如何确保宕机节点恢复后数据的一致性:
- leader向follower发送日志时, 会顺带邻近的前一条日志, follwer接收日志时, 会在相同任期号和索引位置找前一条日志, 如果存在且匹配, 则接收日志; 否则拒绝, leader会减少日志索引位置并进行重试, 直到某个位置与follower达成一致. 然后follower删除索引后的所有日志, 并追加leader发送的日志, 在follower落后太多超过某个阈值时leader会选择直接发送快照让follower尽快与最新的数据保持一致, 一旦日志追加成功, 则follower和leader的所有日志就保持一致. 只有在多数派的follower都响应接受到日志后, 表示事务可以提交, 才能返回客户端提交成功. 这是保障数据一致性的关键点, 确保了Follower节点一定与Leader节点的数据完全一致. 这与ZAB协议不同, Raft算法是不允许节点出现数据"空洞"的.
如何在网络异常导致出现多leader的情况下恢复:
- 网络分区可能会导致出现多个leader, 当分区被消除时需要恢复成单个leader. 这时如果任期小的leader达成了多数派, 则说明任期大的节点以前是leader, 拥有最多的日志, 但是没有达成多数派, 因此它的日志可以被覆盖. 但该节点会尝试继续投票, 新leader发送日志给该节点, 如果leader发现返回的termT>currentTerm, 且还没有达成多数派, 则重新变为follower, 促使TermId更大的节点成为leader. 但并不保证拥有较大TermId的节点一定会成为leader, 因为leader是优先判断是否达成多数派, 如果已经达成多数派了, 则继续为leader, 即使是任期较小的leader.
按图索骥: Etcd的原理和架构
Etcd的组件结构
Etcd主要分为四个部分:
- HTTP Server: 用于处理用户发送的API请求以及其它etcd节点的同步与心跳信息请求.
- **Store:**用于处理etcd支持的各类功能的事务, 包括数据索引、节点状态变更、监控与反馈、事件处理与执行等等, 是etcd对用户提供的大多数API功能的具体实现.
- **Raft:**Raft强一致性算法的具体实现, 是Etcd的核心.
- **WAL:**Write Ahead Log(预写式日志), 是etcd的数据存储方式. 除了在内存中存有所有数据的状态以及节点的索引以外, etcd就通过WAL进行持久化存储. WAL中, 所有的数据提交前都会事先记录日志. Snapshot是为了防止数据过多而进行的状态快照;Entry表示存储的具体日志内容.


通常, 一个用户的请求发送过来, 会经由HTTP Server转发给Store进行具体的事务处理(如果是Proxy模式的Etcd节点接受请求会反向代理给Etcd集群的其他节点), 如果涉及到节点的修改, 则交给Raft模块进行状态的变更、日志的记录, 然后再同步给别的etcd节点以确认数据提交, 最后进行数据的提交, 再次同步. 官网有详细的参考文档
实现集群化
由于Raft算法在做决策时需要多数节点的投票, 所以Etcd一般部署集群推荐奇数个节点, 推荐的数量为3、5或者7个节点构成一个集群, 官方推荐数量为5个节点.Etcd集群有三种配置方案, 在这篇文章中有详细的描述:
- 静态配置启动: 通过initial-cluster参数配置预先指定的Etcd节点实例
- Etcd自身服务发现: 通过discovery参数指定用已有的Etcd服务来作为服务注册中心发现服务, 官方提供了一个公用的接口:https://discovery.etcd.io/new?size=N,
- 通过DNS进行服务发现: 通过discovery-srv参数以及约定的DNS配置实现
这是笔者虚拟机中Kubernetes连接的Etcd集群配置, 使用的是静态配置方式, 只配置了一个名为etcd1的节点
/root/local/bin/etcd --name=etcd1 \
--cert-file=/etc/etcd/ssl/etcd.pem \
--key-file=/etc/etcd/ssl/etcd-key.pem \
--peer-cert-file=/etc/etcd/ssl/etcd.pem \
--peer-key-file=/etc/etcd/ssl/etcd-key.pem \
--trusted-ca-file=/etc/kubernetes/ssl/ca.pem \
--peer-trusted-ca-file=/etc/kubernetes/ssl/ca.pem \
--initial-advertise-peer-urls=https://192.168.113.131:2380 \
--listen-peer-urls=https://192.168.113.131:2380 \
--listen-client-urls=https://192.168.113.131:2379,//127.0.0.1:2379 \
--advertise-client-urls=https://192.168.113.131:2379 \
--initial-cluster-token=etcd-cluster-0 \
--initial-cluster=etcd1=https://192.168.113.131:2380 \
--initial-cluster-state=new \
--data-dir=/var/lib/etcd解决问题
Etcd集群中出现**(N - 1) / 2** 个节点异常或损坏对集群是没有影响的, 但在单节点的情况下一次断电就可能导致数据无法恢复了. 所以最可靠的办法就是定期的备份, 出现灾难性的事件时也能恢复, 具体做法在这里, 通过etcdctl snapshot save/restore来备份/恢复快照.
然而这次的问题比较麻烦, 不仅是单节点的Etcd, 而且没有备份过数据. 经过了以下尝试:
- 删除wal目录中的.broken文件: 再次启动仍然报错(read wal error (walpb: crc mismatch) and cannot be repaired)
- 查看损坏的.wal文件, 发现结尾处写入了很多无意义的字符串和空白. 直接删除文件, 会报错找不到wal文件
- 删除整个wal目录, etcd启动无问题, 但kubernetes内部相关的容器中除了flannel网络, 其他全挂
- 继续通过kubectl命令查询(kubectl describe po kube-dns-566c7c77d8-n8hkf -n kube-system), 发现Pod启动错误
- 继续深入kubectl logs和docker logs查询容器粒度的日志信息, 并未找到有用的错误信息
一番折腾之后感觉已经无力回天, 还有最后两个办法: 通过yml重新设置Kubernetes的Pods, Service, Ingress等; 或者恢复虚拟机快照. 用了第一个办法简单粗暴的解决了问题, 所有的Pod/Service都正常运行了, 但总感觉还是没有解决源头的问题, 日后还需多加学习啊.
这是重新部署恢复后的Pod面板监控截图: 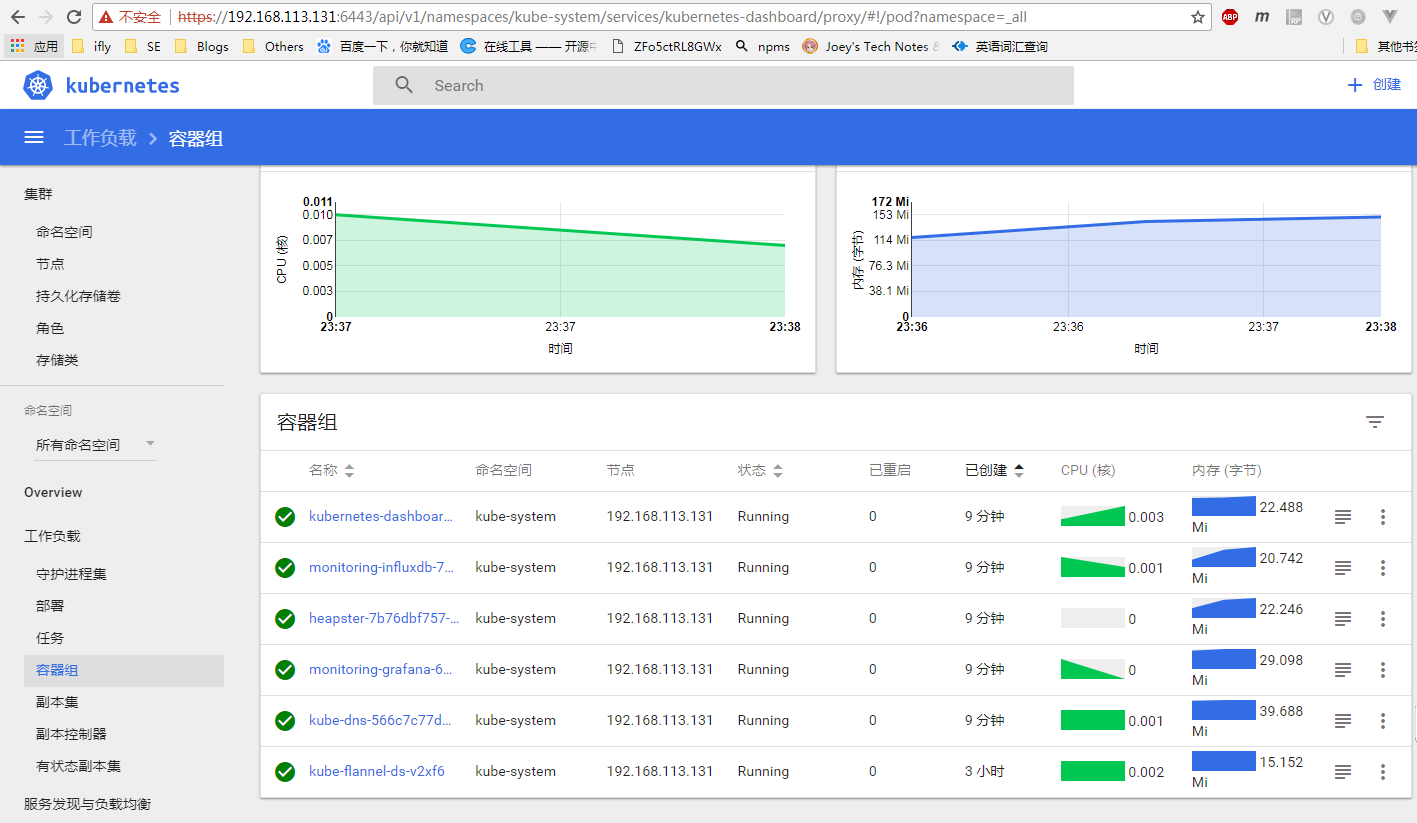
总结
通过一次无意间的断电引发的问题, 可以引申出很多背后原理性的知识. 依葫芦画瓢学会怎么用一项技术没有意义, 怎么在出现问题时通过对原理和本质的思考快速定位解决问题才算是到达了掌握的水平.  最近深感跌入绝望之谷, 送自己一句话吧: 万丈高楼平地起, 勿在浮沙筑高台.
最近深感跌入绝望之谷, 送自己一句话吧: 万丈高楼平地起, 勿在浮沙筑高台.